
Gradients & Gradient Descent¶
How Machines Learn to Reduce Their Mistakes¶
You now know that minimising MSE is the goal. This notebook shows how that minimisation actually happens: by computing the gradient of the loss — the mathematical slope of the error surface — and taking a small step downhill at every iteration.
Why This Matters¶
In the MSE notebook we established the training objective:
We said “minimise this” — but how? For small problems the Normal Equations give a closed-form answer. For everything else (large datasets, neural networks, non-convex losses) we need gradient descent: an iterative algorithm that walks the loss surface downhill step by step.
| What gradient descent powers | Examples |
|---|---|
| Linear & logistic regression training | scikit-learn SGDClassifier, SGDRegressor |
| All deep learning | PyTorch, TensorFlow, Keras |
| Large-scale recommendation systems | YouTube, Netflix ranking models |
| LLM pre-training | Every large language model ever trained |
From Slope to Derivative¶
Slope of a straight line¶
For a straight line , the slope tells you: if I increase by 1, increases by .
Derivative of a curve¶
For a curved function the slope changes at every point. The derivative gives the instantaneous slope at a specific :
For our purposes, three rules are enough:
| Function | Derivative |
|---|---|
| (constant) | 0 |
| (chain rule) |
Partial derivative¶
When a function depends on multiple parameters — say — a partial derivative treats all parameters except as constants and differentiates only with respect to .
Deriving the Gradient of MSE¶
For simple linear regression, , the loss is:
Step 1 — let (the residual).
Step 2 — partial derivative with respect to (intercept).
Apply the chain rule: outer derivative of is , inner derivative of with respect to is -1.
Step 3 — partial derivative with respect to (slope).
Inner derivative of with respect to is .
The gradient vector (one entry per parameter):
The gradient points uphill (toward greater loss). Taking a step in the negative gradient direction moves us downhill.
The Gradient Descent Update Rule¶
where is the learning rate — the size of each step.
Repeat until convergence (loss stops decreasing meaningfully).
Visual Flow — One Gradient Descent Step¶
Each loop = one training epoch (batch GD) or one mini-batch step.
Worked Example — Gradient Descent from Scratch¶
%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
rng = np.random.default_rng(0)
x = np.array([1.0, 2, 3, 4, 5, 6])
y = 2.0 * x + 1.0 + rng.normal(0, 0.5, len(x))
# Gradient descent for y = t0 + t1*x
t0, t1 = 0.0, 0.0
lr = 0.02
n = len(x)
history = []
for step in range(200):
y_hat = t0 + t1 * x
residuals = y - y_hat
loss = np.mean(residuals**2) / 2
# Gradients (negative of what we derived, because residuals = y - y_hat)
g0 = -residuals.mean()
g1 = -(x * residuals).mean()
t0 -= lr * g0
t1 -= lr * g1
history.append(loss)
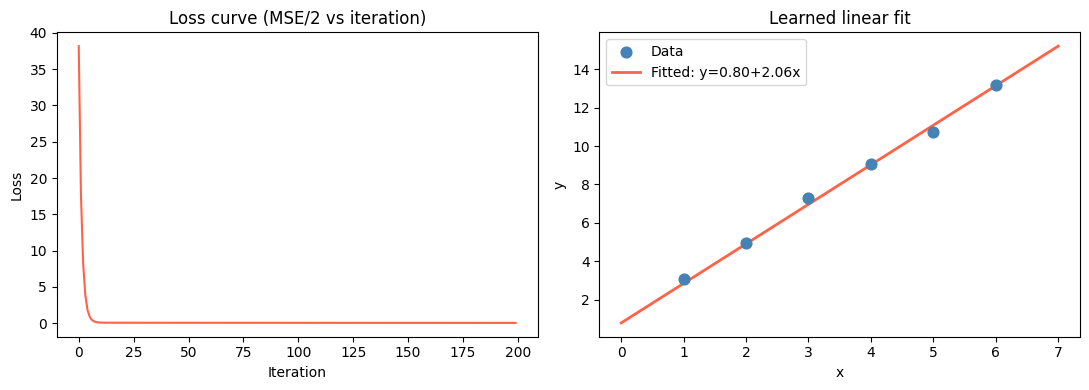
print(f"Learned: t0={t0:.4f} t1={t1:.4f} (true: t0=1.0 t1=2.0)")
fig, axes = plt.subplots(1, 2, figsize=(11, 4))
# Loss curve
axes[0].plot(history, color='tomato')
axes[0].set_title('Loss curve (MSE/2 vs iteration)')
axes[0].set_xlabel('Iteration')
axes[0].set_ylabel('Loss')
# Fit vs data
x_line = np.linspace(0, 7, 100)
axes[1].scatter(x, y, color='steelblue', s=60, label='Data', zorder=3)
axes[1].plot(x_line, t0 + t1 * x_line, color='tomato', linewidth=2, label=f'Fitted: y={t0:.2f}+{t1:.2f}x')
axes[1].set_title('Learned linear fit')
axes[1].set_xlabel('x')
axes[1].set_ylabel('y')
axes[1].legend()
plt.tight_layout()
plt.show()Learned: t0=0.7969 t1=2.0569 (true: t0=1.0 t1=2.0)
Visualising the Loss Surface¶
%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
rng = np.random.default_rng(0)
x = np.array([1.0, 2, 3, 4, 5, 6])
y = 2.0 * x + 1.0 + rng.normal(0, 0.5, len(x))
# Grid over (t0, t1)
T0 = np.linspace(-2, 4, 120)
T1 = np.linspace(0, 4, 120)
Z = np.zeros((len(T0), len(T1)))
for i, a in enumerate(T0):
for j, b in enumerate(T1):
Z[i, j] = np.mean((y - (a + b * x))**2)
# Trace descent path
t0, t1 = -1.5, 0.2
path = [(t0, t1)]
lr = 0.02
for _ in range(60):
res = y - (t0 + t1 * x)
t0 -= lr * (-res.mean())
t1 -= lr * (-(x * res).mean())
path.append((t0, t1))
path = np.array(path)
fig, ax = plt.subplots(figsize=(7, 6))
cp = ax.contourf(T1, T0, Z, levels=40, cmap='RdYlGn_r')
plt.colorbar(cp, ax=ax, label='MSE loss')
ax.plot(path[:, 1], path[:, 0], 'w.-', linewidth=1.5, markersize=4, label='Descent path')
ax.plot(path[0, 1], path[0, 0], 'wo', markersize=8, label='Start')
ax.plot(path[-1, 1], path[-1, 0], 'w*', markersize=12, label='End')
ax.set_xlabel(r'$\theta_1$ (slope)')
ax.set_ylabel(r'$\theta_0$ (intercept)')
ax.set_title('Loss surface and gradient descent path')
ax.legend()
plt.tight_layout()
plt.show()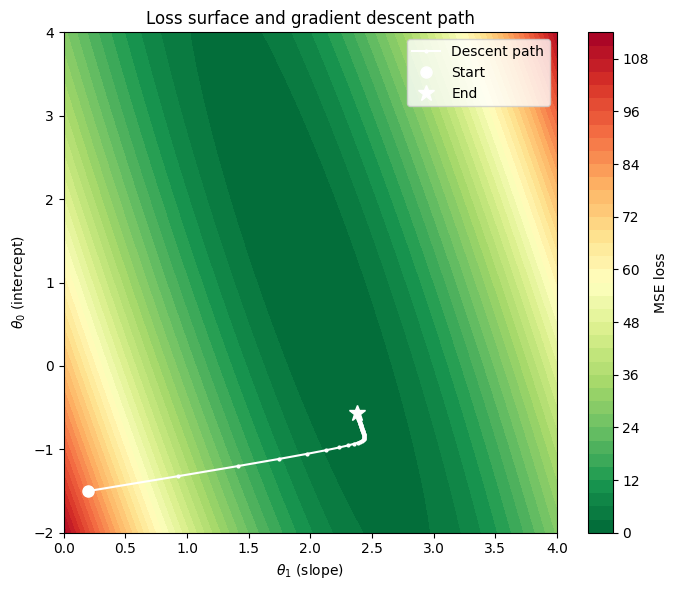
Learning Rate Sensitivity¶
%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
rng = np.random.default_rng(0)
x = np.array([1.0, 2, 3, 4, 5, 6])
y = 2.0 * x + 1.0 + rng.normal(0, 0.5, len(x))
def run_gd(lr, steps=80):
t0, t1 = 0.0, 0.0
losses = []
for _ in range(steps):
res = y - (t0 + t1 * x)
loss = np.mean(res**2)
losses.append(loss)
t0 -= lr * (-res.mean())
t1 -= lr * (-(x * res).mean())
return losses
fig, ax = plt.subplots(figsize=(9, 4))
configs = [(0.001, 'Too small (lr=0.001)', 'steelblue'),
(0.02, 'Good (lr=0.02)', 'green'),
(0.25, 'Too large (lr=0.25)', 'tomato')]
for lr, label, color in configs:
losses = run_gd(lr)
# Clip for visibility
clipped = np.clip(losses, 0, 20)
ax.plot(clipped, color=color, label=label)
ax.set_xlabel('Iteration')
ax.set_ylabel('MSE loss (clipped at 20)')
ax.set_title('Effect of learning rate on convergence')
ax.legend()
plt.tight_layout()
plt.show()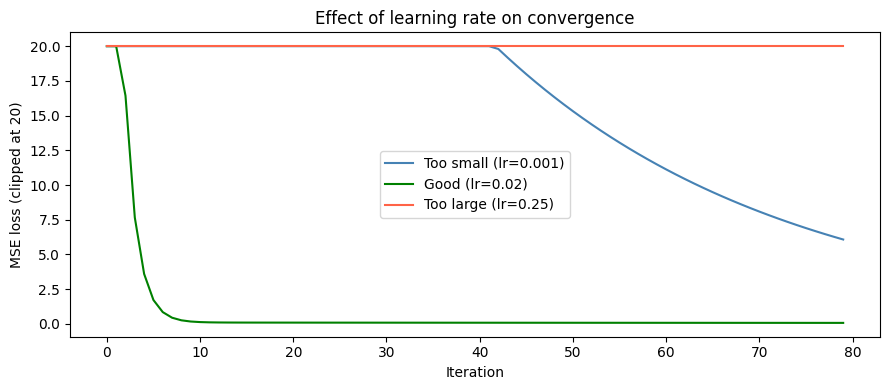
Three Variants of Gradient Descent¶
In practice, mini-batch SGD dominates because it exploits GPU parallelism and adds enough noise to escape shallow local minima.
Try It in the Browser¶
Run one full gradient descent from scratch — edit the learning rate and see how convergence changes.
Matrix Form (Multiple Features)¶
For multiple features the model is and the MSE gradient becomes a clean matrix expression:
The update rule is:
This is one matrix–vector multiply per iteration, making it efficient with NumPy or any BLAS library.
%matplotlib inline
import numpy as np
rng = np.random.default_rng(42)
n, d = 80, 3
X_raw = rng.normal(0, 1, (n, d))
true_theta = np.array([1.5, -0.8, 2.0])
y = X_raw @ true_theta + 0.5 + rng.normal(0, 0.3, n)
# Add bias column
X = np.column_stack([np.ones(n), X_raw])
theta = np.zeros(d + 1)
lr = 0.05
losses = []
for _ in range(300):
y_hat = X @ theta
residuals = y - y_hat
losses.append(np.mean(residuals**2))
theta += (lr / n) * X.T @ residuals
print("Learned theta:", np.round(theta, 4))
print("True [bias, t1, t2, t3]: [0.5, 1.5, -0.8, 2.0]")
print(f"Final MSE: {losses[-1]:.5f}")Learned theta: [ 0.52 1.4798 -0.776 1.9671]
True [bias, t1, t2, t3]: [0.5, 1.5, -0.8, 2.0]
Final MSE: 0.09482
Guided Practice¶
What does the gradient of the loss tell you about a parameter?¶
If the gradient is close to zero, what might it indicate?¶
Why do we subtract the gradient in the update rule rather than add it?¶
A model with a very large learning rate shows a loss that oscillates up and down. What is happening?¶
Exercises¶
Exercise 1 — Manual one-step update¶
Given: samples, , , current , , .
Compute for each sample.
Compute the residuals .
Compute and .
Compute the updated and .
import numpy as np
x = np.array([1.0, 2.0, 3.0])
y = np.array([3.0, 5.0, 7.0])
t0, t1 = 0.0, 0.0
lr = 0.1
# TODO: compute one gradient descent update step
# Expected result: t0 ~= 0.333, t1 ~= 0.733
Solution
y_hat = t0 + t1 * x # [0, 0, 0]
residuals = y - y_hat # [3, 5, 7]
g0 = -residuals.mean() # -5.0
g1 = -(x * residuals).mean() # -(1*3 + 2*5 + 3*7)/3 = -34/3 ≈ -11.33
t0 = t0 - lr * g0 # 0 - 0.1*(-5) = 0.5
t1 = t1 - lr * g1 # 0 - 0.1*(-11.33) = 1.133After one step: , . Many more steps needed to converge to the true .
Exercise 2 — Loss curve diagnosis¶
Run gradient descent with three different learning rates (your choice) and plot all three loss curves on one figure. Label which rate is too small, too large, or good. Describe in 2–3 sentences what you observe.
%matplotlib inline
import numpy as np, matplotlib.pyplot as plt
rng = np.random.default_rng(1)
x = rng.uniform(0, 5, 30)
y = 3 * x + 2 + rng.normal(0, 1, 30)
# TODO: implement run_gd(lr, steps) and plot three curves
Exercise 3 — Mini-batch gradient descent¶
Adapt the batch gradient descent loop above to use mini-batches of size 8. Shuffle the data before each epoch and process it in chunks.
%matplotlib inline
import numpy as np, matplotlib.pyplot as plt
rng = np.random.default_rng(7)
n = 100
x = rng.uniform(0, 10, n)
y = 1.5 * x + 3.0 + rng.normal(0, 1.5, n)
X = np.column_stack([np.ones(n), x])
batch_size = 8
theta = np.zeros(2)
lr = 0.01
epochs = 50
epoch_losses = []
# TODO: implement mini-batch loop
# For each epoch: shuffle indices, iterate over batches, update theta
# After each epoch, record full-dataset MSE
Mini-batch loop skeleton
for epoch in range(epochs):
idx = rng.permutation(n)
for start in range(0, n, batch_size):
batch = idx[start:start + batch_size]
Xb, yb = X[batch], y[batch]
res = yb - Xb @ theta
theta += (lr / len(batch)) * Xb.T @ res
epoch_losses.append(np.mean((y - X @ theta)**2))Common Pitfalls¶
Summary¶
Key takeaways
| Concept | One-line meaning |
|---|---|
| Derivative | Instantaneous slope of a function at a point |
| Partial derivative | Slope with respect to one variable, others fixed |
| Gradient | Vector of all partial derivatives; points uphill |
| Gradient descent | Iteratively subtract to move downhill |
| Learning rate | Step size; too large = diverge, too small = slow |
| Batch GD | Use all data per step; stable, slow on large datasets |
| SGD | Use one sample per step; fast, noisy |
| Mini-batch SGD | Use samples per step; best of both worlds |
The MSE gradient for simple linear regression:
Next Up — OLS and the Normal Equations¶
You can now walk the loss surface. Next: solve it directly.¶
Gradient descent takes many small steps downhill. But for linear regression there is a one-shot analytical solution: the Normal Equations. The next notebook derives $\boldsymbol{\theta}^* = (\mathbf{X}^\top\mathbf{X})^{-1}\mathbf{X}^\top\mathbf{y}$ from scratch using matrix calculus and shows when to use it versus gradient descent.
Dependencies you already have: gradient of MSE in matrix form, the update rule, and the idea that convergence means zero gradient.